domingo, 12 de septiembre de 2010
TERCERA LEY DE NEWTON O LEY DE ACCIÓN Y REACCIÓN
 La tercera ley es completamente original de Newton (pues las dos primeras ya habían sido propuestas de otras maneras por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo.
La tercera ley es completamente original de Newton (pues las dos primeras ya habían sido propuestas de otras maneras por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo.
Expone que por cada fuerza que actúa sobre
un cuerpo, este realiza una fuerza de igual intensidad y dirección, pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la misma recta, siempre se presentan en pares de igual magnitud y opuestas en dirección.
Este principio presupone que la interacción entre dos partículas se propaga instantáneamente en el espacio (lo cual requeriría velocidad infinita), y en su formulación original no es válido para fuerzas electromagnéticas puesto que estas no se propagan por el espacio de modo instantáneo sino que lo hacen a velocidad finita "c".
Es importante observar que este principio de acción y reacción relaciona dos fuerzas que no están aplicadas al mismo cuerpo, produciendo en ellos aceleraciones diferentes, según sean sus masas. Por lo demás, cada una de esas fuerzas obedece por separado a la segunda ley.
Junto con las anteriores, permite enunciar los principios de conservación del momento lineal y del momento angular.
 La segunda ley del movimiento de Newton dice que
La segunda ley del movimiento de Newton dice que
Esta ley explica qué ocurre si sobre un
cuerpo en movimiento (cuya masa no tiene por qué ser constante) actúa una fuerza neta: la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección. En concreto, los cambios experimentados en la cantidad de movimiento de un cuerpo son proporcionales a la fuerza motriz y se desarrollan en la dirección de esta; esto es, las fuerzas son causas que producen aceleraciones en los cuerpos. Consecuentemente, hay relación entre la causa y el efecto, esto es, la fuerza y la aceleración están relacionadas. Dicho sintéticamente, la fuerza se define simplemente en función del momento en que se aplica a un objeto, con lo que dos fuerzas serán iguales si causan la misma tasa de cambio en el momento del objeto.
En términos matemáticos esta ley se expresa mediante la relación:

Donde  es la cantidad de movimiento y
es la cantidad de movimiento y  la fuerza total. Bajo la hipótesis de constancia de la masa y pequeñas velocidades, puede reescribirse más sencillamente como:
la fuerza total. Bajo la hipótesis de constancia de la masa y pequeñas velocidades, puede reescribirse más sencillamente como:

que es la ecuación fundamental de la dinámica, donde la constante de proporcionalidad distinta para cada cuerpo es su masa de inercia, pues las fuerzas ejercidas sobre un cuerpo sirven para vencer su inercia, con lo que masa e inercia se identifican. Es por esta razón por la que la masa se define como una medida de la inercia del cuerpo.
Por tanto, si la fuerza resultante que actúa sobre una partícula no es cero, esta partícula tendrá una aceleración proporcional a la magnitud de la resultante y en dirección de ésta. La expresión anterior así establecida es válida tanto para la mecánica clásica como para la mecánica relativista, a pesar de que la definición de momento lineal es diferente en las dos teorías: mientras que la dinámica clásica afirma que la masa de un cuerpo es siempre la misma, con independencia de la velocidad con la que se mueve, la mecánica relativista establece que la masa de un cuerpo aumenta al crecer la velocidad con la que se mueve dicho cuerpo.
De la ecuación fundamental se deriva también la definición de la unidad de fuerza o newton (N). Si la masa y la aceleración valen 1, la fuerza también valdrá 1; así, pues, el newton es la fuerza que aplicada a una masa de un kilogramo le produce una aceleración de 1 m/s². Se entiende que la aceleración y la fuerza han de tener la misma dirección y sentido.
La importancia de esa ecuación estriba sobre todo en que resuelve el problema de la dinámica de determinar la clase de fuerza que se necesita para producir los diferentes tipos de movimiento: rectilíneo uniforme (m.r.u), circular uniforme (m.c.u) y uniformemente acelerado (m.r.u.a).
Si sobre el cuerpo actúan muchas fuerzas, habría que determinar primero el vector suma de todas esas fuerzas. Por último, si se tratase de un objeto que cayese hacia la tierra con un resistencia del aire igual a cero, la fuerza sería su peso, que provocaría una aceleración descendente igual a la de la gravedad.
 En física, el movimiento circular uniforme describe el movimiento de un cuerpo atravesando, con rapidez constante, una trayectoria circular.
En física, el movimiento circular uniforme describe el movimiento de un cuerpo atravesando, con rapidez constante, una trayectoria circular.
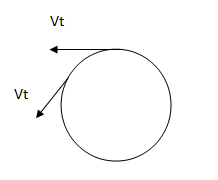
Aunque la rapidez del objeto es constante, su velocidad no lo es: La velocidad, una magnitud vectorial, tangente a la trayectoria, en cada instante cambia de
dirección. Esta circunstancia implica la existencia de una aceleración que, si bien en este caso no varía al módulo de la velocidad, sí varía su dirección.
El Movimiento Circular Uniforme es aquel en el que el móvil se desplaza en una trayectoria circular (una circunferencia o un arco de la misma) a una velocidad constante. Se consideran dos velocidades, la rapidez del desplazamiento del móvil y la rapidez con que varía el ángulo en el giro.
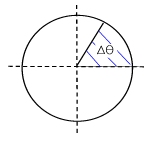
VELOCIDAD ANGULAR EN UN MOVIMIENTO CIRCULAR UNIFORME
La velocidad angular es la rapidez con la que varía el ángulo en el tiempo y se mide en radianes / segundos.
(2 π [radianes] = 360°)
Por lo tanto si el ángulo es de 360 grados (una vuelta) y se realiza por ejemplo en un segundo, la velocidad angular es: 2 π [rad / s].
Si se dan dos vueltas en 1 segundo la velocidad angular es 4 π [rad / s].
Si se da media vuelta en 2 segundos es 1/2 π [rad / s].
La velocidad angular se calcula como la variación del ángulo sobre la variación del tiempo.

Considerando que la frecuencia es la cantidad de vueltas sobre el tiempo, la velocidad angular también se puede expresar como:

En MCU la velocidad angular es constante.
VELOCIDAD TANGENCIAL DEL M.C.U
La velocidad tangencial es la velocidad del móvil (distancia que recorre en el tiempo). Por lo tanto para distintos radios y a la misma velocidad angular, el móvil se desplaza a distintas velocidades tangenciales. A mayor radio y a la misma cantidad de vueltas por segundo, el móvil recorre una trayectoria mayor, porque el perímetro de esa circunferencia es mayor y por lo tanto la velocidad tangencial también es mayor. La velocidad tangencial se mide en unidades de espacio sobre unidades de tiempo, por ejemplo [m/s], [km / h], etc. Se calcula como la distancia recorrida en un período de tiempo.
POSICIÓN RESPECTO DEL TIEMPO EN M.C.U
En mcu podemos conocer en que posición se encuentra el móvil luego de un tiempo, calculando el ángulo que giró en ese intervalo. Una vez que tenemos el ángulo restamos un número entero k (número de vueltas) multiplicado por 2 π (ángulo de una vuelta) y obtenemos el ángulo en radianes en el que se encuentra el móvil.
La ecuación para determinar la posición respecto del tiempo, utilizando la velocidad angular, es similar a la de mru, pero en vez de distancias utilizamos los ángulos.
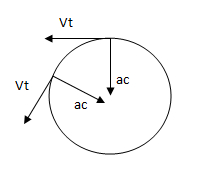
ACELERACIÓN CENTRÍPETA EN M.C.U
En MCU, la velocidad tangencial es constante en módulo durante todo el movimiento. Sin embargo, es un vector que constantemente varía de dirección (siempre sobre una recta tangente a la circunferencia en el punto en donde se encuentre el móvil). Para producir la modificación de una velocidad aparece una aceleración, pero debido a que no varía el módulo de la velocidad, el vector de esta aceleración es perpendicular al vector de la velocidad.
Frecuencia
La frecuencia mide la cantidad de vueltas que se dan en un período de tiempo (normalmente un segundo). La unidad más común es el Hertz. Un Hertz equivale a una vuelta en un segundo (1 / s).
Período
El período mide el tiempo que se tarde en dar una vuelta completa y se mide en segundos. Es la inversa de la frecuencia.

sábado, 12 de junio de 2010
El movimiento parabólico completo se puede considerar como la composición de un avance horizontal rectilíneo uniforme y un lanzamiento vertical hacia arriba, que es un movimiento rectilíneo uniformemente acelerado hacia abajo (MRUA) por la acción de la gravedad.
En condiciones ideales de resistencia al avance nulo y campo gravitatorio uniforme, lo anterior implica que:
Un cuerpo que se deja caer libremente y otro que es lanzado horizontalmente desde la misma altura tardan lo mismo en llegar al suelo.
La independencia de la masa en la caída libre y el lanzamiento vertical es igual de válida en los movimientos parabólicos.
Un cuerpo lanzado verticalmente hacia arriba y otro parabólicamente completo que alcance la misma altura tarda lo mismo en caer.
donde:
es el módulo de la velocidad inicial.
es el ángulo de la velocidad inicial sobre la horizontal.
es la aceleración de la gravedad.
La velocidad inicial se compone de dos partes:
que se denomina componente horizontal de la velocidad inicial.
En lo sucesivo
que se denomina componente vertical de la velocidad inicial.
En lo sucesivo
Se puede expresar la velocidad inicial :


MOVIMIENTO PARABÓLICO
 Se denomina movimiento parabólico al realizado por un objeto cuya trayectoria describe una parábola. Se corresponde con la trayectoria ideal de un proyectil que se mueve en un medio que no ofrece resistencia al avance y que está sujeto a un campo gravitatorio uniforme.
Se denomina movimiento parabólico al realizado por un objeto cuya trayectoria describe una parábola. Se corresponde con la trayectoria ideal de un proyectil que se mueve en un medio que no ofrece resistencia al avance y que está sujeto a un campo gravitatorio uniforme.
Puede ser analizado como la composición de dos movimientos rectilíneos: un movimiento rectilíneo uniforme horizontal y un movimiento rectilíneo uniformemente acelerado vertical.
l movimiento parabólico completo se puede considerar como la composición de un avance horizontal rectilíneo uniforme y un lanzamiento vertical hacia arriba, que es un movimiento rectilíneo uniformemente acelerado hacia abajo (MRUA) por la acción de la gravedad.
En condiciones ideales de resistencia al avance nulo y campo gravitatorio uniforme, lo anterior implica que:
- Un cuerpo que se deja caer libremente y otro que es lanzado horizontalmente desde la misma altura tardan lo mismo en llegar al suelo.
- La independencia de la masa en la caída libre y el lanzamiento vertical es igual de válida en los movimientos parabólicos.
- Un cuerpo lanzado verticalmente hacia arriba y otro parabólicamente completo que alcance la misma altura tarda lo mismo en caer.
Hay dos ecuaciones que rigen el movimiento parabólico:


donde:
 es el módulo de la velocidad inicial.
es el módulo de la velocidad inicial. es el ángulo de la velocidad inicial sobre la horizontal.
es el ángulo de la velocidad inicial sobre la horizontal. es la aceleración de la gravedad.
es la aceleración de la gravedad.
La velocidad inicial se compone de dos partes:
 que se denomina componente horizontal de la velocidad inicial.
que se denomina componente horizontal de la velocidad inicial.- En lo sucesivo

- En lo sucesivo
 que se denomina componente vertical de la velocidad inicial.
que se denomina componente vertical de la velocidad inicial.- En lo sucesivo

- En lo sucesivo
Se puede expresar la velocidad inicial de este modo:
 :
:
Será la que se utilice, excepto en los casos en los que deba tenerse en cuenta el ángulo de la velocidad inicial.


Determine el valor de la fuerza F, para que el sistema permanezca en equilibrio. La fuerza F es paralela al plano, P tiene un peso de 150 N y Q pesa 3050 N. No existe fricción entre el cuerpo Q y el plano. Sol. 1835,4 N.
Dos fuerzas paralelas, del mismo sentido, están separadas por una distancia de 0,2 m. Si una de las fuerzas es de 13 N y la línea de acción de la resultante está a 0,08 m de la otra. Encontrar: la magnitud de la resultante, y la magnitud de la otra fuerza. Sol. 6,5 N y 19,5 N respectivamente
La viga AB es uniforme y tiene una masa de 100 kg. Descansa en sus extremos A y B y soporta las masas como se indica en la figura anexa. Calcular la reacción en los soportes? Sol. RA = 183,3 Kgf ; RB = 116,7 Kgf.



Al igual que se pueden combinar dos vectores en uno, o sea su suma, también es posible hacer lo contrario; dado un vector, encontrar los dos vectores cuya suma es el vector primitivo.. Imagine que el vector dado está representado por la fecha AB del dibujo y queremos descomponerlo en las partes de la suma de dos vectores dirigidos a lo largo de AA' y AA". Dibujamos líneas a lo largo de AA' y AA" y también líneas paralelas a ellas desde B, el otro final del vector. Si AA' y AA" son perpendiculares entre si (lo usual), entonces estas líneas encierran unrectángulo ACBD, donde AB es su diagonal. Es evidente que AC y CB son la solución a nuestro problema y en la suma de vectores AC + CB = AB |
AC y CB se llaman los componentes de AB (ó vectores componentes de AB) a lo largo de las dos direcciones dadas. AD y DB, que tienen la misma longitud y dirección, son también una solución y representan los mismos componentes, la diferencia es que su suma se efectúa en orden inverso. Si AA' y AA" no son perpendiculares entonces ACBD es un paralelogramo. |

SUMA DE VECTORES POR EL MÉTODO GRÁFICO
Para sumar escalares, como tiempo, se usa la aritmética simple. Si dos vectores se encuentran en la misma recta también podemos usar aritmética, pero no así si los vectores no se encuentran en la misma recta. Por ejemplo, si Ud. se desplaza 4 km hacia el este y luego 3 km hacia el norte, su desplazamiento neto o resultante respecto del punto de partida tendrá una magnitud de 5 km y un ángulo ![]() = 36.87º respecto del eje x positivo. Ver figura
= 36.87º respecto del eje x positivo. Ver figura
Vectorialmente, el desplazamiento resultante VR, es la suma de los vectores V1 y V2, o sea, escribimos VR = V1 + V2 Esta es una ecuación vectorial.
La regla general para sumar vectores en forma gráfica (con regla y transportador), que de hecho es la definición de cómo se suman vectores, es la siguiente:
(1) Use una misma escala para las magnitudes.
(2) Trace uno de los vectores, digamos V1
(3) Trace el segundo vector, V2, colocando su cola en la punta del primer vector, asegurándose que su dirección sea la correcta.
(4) La suma o resultante de los dos vectores es la flecha que se traza desde la cola del primer vector hasta la punta del segundo.
Este método se llama suma de vectores de cola a punta.
Notemos que V1 + V2 = V2 + V1, esto es, el orden no es importante.
Este método de cola a punta se puede ampliar a tres o más vectores. Suponga que deseamos sumar los vectores V1, V2, y V3 representados a continuación:
VR = V1 + V2 +V3 es el vector resultante destacado con línea gruesa.
Un segundo método para sumar dos vectores es el método del paralelogramo, equivalente al de cola y punta. En este método se trazan ambos desde un origen común y se forma un paralelogramo usando los dos como lados adyacentes. La resultante es la diagonal que se traza desde el origen común.
VECTORES
 Un vector es utilizado para representar una magnitud física el cual necesita de un módulo y una
Un vector es utilizado para representar una magnitud física el cual necesita de un módulo y una
dirección (u orientación) para quedar definido.
Los vectores se pueden representar geométricamente como segmentos de recta dirigidos flechas en planos R²o R3; es decir, bidimensional o tridimensional.
- Ejemplos
- La velocidad con que se desplaza un móvil es una magnitud vectorial, ya que no queda definida tan sólo por su módulo (lo que marca el velocímetro, en el caso de un automóvil), sino que se requiere indicar la dirección hacia la que se dirige.
- La fuerza que actúa sobre un objeto es una magnitud vectorial, ya que su efecto depende, además de su intensidad o módulo, de la dirección en la que opera.
- El desplazamiento de un objeto.
El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman magnitudes escalares aquellas en que sólo influye su tamaño. Por el contrario, se consideran magnitudes vectoriales aquellas en las que, de alguna manera, influyen la dirección y el sentido en que se aplican.
Como ejemplos de magnitudes escalares se pueden citar la masa de un cuerpo, la temperatura, el volumen, etc.
Cuando se plantea un movimiento no basta con decir cuánto se ha desplazado el móvil, sino que es preciso decir también en qué dirección y sentido ha tenido lugar el movimiento. No son los mismos los efectos de un movimiento de 100 km a partir de un punto si se hace hacia el norte o si se hace en dirección sudoeste, ya que se llegaría a distinto lugar.
Aunque el estudio matemático de los vectores tardó mucho en hacerse formalmente, en la actualidad tiene un gran interés, sobre todo a partir de los estudios de David Hilbert (1862-1943) y Stefan Banach (1892-1945), que hicieron uso de la teoría de espacios vectoriales, aplicándolos a las técnicas del análisis matemático.
Por lo tanto el resultado de nuestra investigación esta enmarcada en los concepto, graficas y ejercicio que a continuación le expondremos.
Definición de Vectores.
En matemáticas, cantidad que tiene magnitud, dirección y sentido al mismo tiempo. Por ejemplo, si una cantidad ordinaria, o escalar, puede ser una distancia de 6 km, una cantidad vectorial sería decir 6 km norte. Los vectores se representan normalmente como segmentos rectilíneos orientados, como B en el diagrama que se muestra a continuación; el punto O es el origen o punto de aplicación del vector y B su extremo. La longitud del segmento es la medida o módulo de la cantidad vectorial, y su dirección es la misma que la del vector.

El uso sencillo de los vectores así como los cálculos utilizando vectores quedan ilustrados en este diagrama, que muestra el movimiento de una barca para atravesar una corriente de agua. El vector a, u A, indica el movimiento de la barca durante un determinado periodo de tiempo si estuviera navegando en aguas tranquilas; el vector b, o $,representa la deriva o empuje de la corriente durante el mismo periodo de tiempo. El recorrido real de la barca, bajo la influencia de su propia propulsión y de la corriente, se representa con el vector c, u B. Utilizando vectores, se puede resolver gráficamente cualquier problema relacionado con el movimiento de un objeto bajo la influencia de varias fuerzas.
domingo, 30 de mayo de 2010
